Urpal
Urpal is your pal for Uppaal.
Urpal takes an Uppaal model as input, performs manipulations as described by a simple command language, and writes the resulting model back to a file. Its prime feature is the ability to construct a testing automaton for determining timed trace inclusion for a restricted class of timed automata. Uppaal can also: duplicate automata; create automata ready to accept all synchronisations on a set of channels; prune transitions based on their action label; conflate, drop and rename locations; and scale the graphical layout of a model. More details are in the manual page.
Descriptions of the testing construction can be found in:
- The thesis of Mariëlle Stoelinga, specifically Chapter 7 and Appendix A. Development on Urpal began from the descriptions therein at the suggestion of Frits Vaandrager.
- The Scaling up Uppaal paper of Henrik Ejersbo Jensen, Kim Guldstrand Larsen, and Arne Skou. Urpal incorporates their construction for handling urgent locations and shared variables.
- The paper by Arcot Sowmya and me, to be presented at EMSOFT 2008. This paper presents several improvements to the original CSE technical report (UNSW-CSE-TR-0723). There is also an edited and slightly less compressed description in Chapter 5 of my thesis.
The testing construction cannot be performed on all timed automata, specifically
several modelling features are
- non-deterministic automata (this assumption is not checked, but see the later notes),
- non-synchronizing (τ) transitions,
- committed locations,
- process priorities,
- channel priorities,
- inputs on broadcast channels,
- some combinations of
forallandselectbindings (see this paper).
The software was developed at the The University of NSW and NICTA. It is released under a BSD License.
The source repository can be browsed online.
This software is provided as a prototype only: use at your own risk! It surely contains faults, please report them.
Download
The latest version is 1.1.0 (20080829). It processes Uppaal 4.0.6 models.
| Operating System | Architecture | |
|---|---|---|
| Source code |  urpal-1.1.0.tar.gz urpal-1.1.0.tar.gz |
|
Graphviz is required to run Urpal. The source code has additional compilation dependencies.
Step-by-step Example
- Download and extract Urpal.
- Download the Uppaal DTD, flat-1_1.dtd.
- Install Graphviz if necessary.
- Edit
urpalrc, setting the paths to flat-1_1.dtd and Graphviz:dtd_path="flat-1_1.dtd" graphviz { path = "/usr/local" engine = neato }
Urpal will look for the Graphviz executables, likefdpandneato, in abinsubdirectory of the path given. - Download this simple example model.
- Start a terminal, and run urpal:
./urpal -i urpal-example.xml -o urpal-example-after.xml -e "Test=maketest(Template)"
In the Windows command interpreter (cmd.exe), type rather:urpal -i urpal-example.xml -o urpal-example-after.xml -e "Test=maketest(Template)"
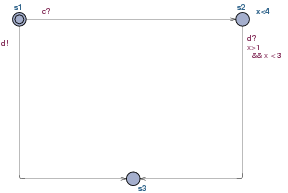
- The program should produce a model
urpal-example-after.xmlthat can be opened in Uppaal. The new model should contain the originalTemplateautomaton and a newTestautomaton. After tidying up the labels, the latter should resemble: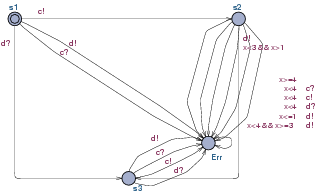
One good way to verify the result is to model check the original
automaton against the generated test automaton, which
also exposes models that are not deterministic.
This would be done for the above example by first changing the system
declaration to: system Template, Test;, then
verifying the formula: A[] (not Test.Err).
Such tests have previously revealed faults in Urpal. Another test is to verify that no new deadlocks are introduced, as Test automata are always ready to synchronize. Since there are already two possibilities for deadlock in the example, the formula is:
A[] (deadlock imply ((Template.s2 and Template.x >=3 and Template.x < 4) or Template.s3))
The source repository includes a number of small test models, and a larger railway crossing controller example.
Improving the appearance of results
The layout routines rarely give perfect results, but they usually make the basic structure clear enough so that sense can be made of counter-example traces, and they are a reasonable starting point for manual rearrangement of label positions (the transition nails make other changes painful). If the results are very poor, try:
- Scaling the source model before generating the test automaton.
For example,
Test=maketest(scale(Template, 2.0)). - Tabulating the labels on transitions to the error state.
For example,
Test=tabulate(maketest(Template), {Err}). - Trying different Graphviz layout routines.
For example, either fdp
--set=graphviz{engine=fdp}or the other spring-based approach neato--set=graphviz{engine=neato}. Usually one will give better results than the other for a particular model. - Various combinations of the above.
- Ultimately, manual rearranging the original automaton or the
resulting test automaton is sometimes the only satisfactory
approach.
Scaling the model and using the
tabulatefeature can make it easier.